在某次rig的時候無意間的看到了這篇文章
其實他非常適合喜歡同時切換IK/FK來做Animation的Animator
((好像繞口令...
而我將他的教學
用自己的想法整理了一下筆記
以下是一點點的心得報告。請見!
再做Animation的時候,大部分人喜歡用IK手,畢竟方便
手軸帶動整個手臂,可以省去不少時間
但是像一些單純的揮手或是搖擺,希望藉由肩膀來驅動整個手臂的時候
FK就顯得相對好用
針對喜歡兩個方法互用的人
無接縫的切換就顯得重要。
Q:何謂無接縫切換
A:在原先IK的設定裡面,就有提供最簡易的IK/FK切換法,但是當切換的時候,會出現位差
而無接縫切換就是,能夠解決這個問題的好方法....
((聽不懂嗎?
((那就讓我們繼續看下去......

點選IK,在設定裡頭,ik分為RP跟SC
這邊我們使用的設定是ikRP,如上圖
RP跟SC的差別在哪!?

在做手部或是腳的IK時,我們會希望能夠控制手軸或是膝蓋的旋轉
所以使用ikRP
至於ikSC的實際使用時機....哈哈哈說真的我也還不知道
或許哪天搞清楚的時候,在分享給大家
anyway
創建完IK在骨頭上後,我們會看到channel Box這邊除了一般的位移旋轉資訊之外
另外也看到了底下的幾個channels


((大家應該都知道兇手是誰了!!??
特別注意的是IK Blend這個選項
當數值是1的時候
IK就是很正常的IK
被手腕的部分逆向驅動

但當我們把ik Blend歸0的時候
就無法移動IK

這時就只能轉動骨頭,當作FK來使用了

所以上面其實就是最基礎的IK與FK
但是無奈的是,在架設完控制器以後會出現位差
沒有辦法做完全切換
我提供兩張圖讓大家參照


大家可以發現,旁邊IK/FK的切換扭轉過來以後
IK留在原地(紅色的十字),而切到FK以後手臂又跳回來了!
所以我們才需要使用
IK/FK的切換mel
(控制器製作中......)
製作好FK以及IK的控制器以後
我們就可以開始進行IK/FK切換的mel製作
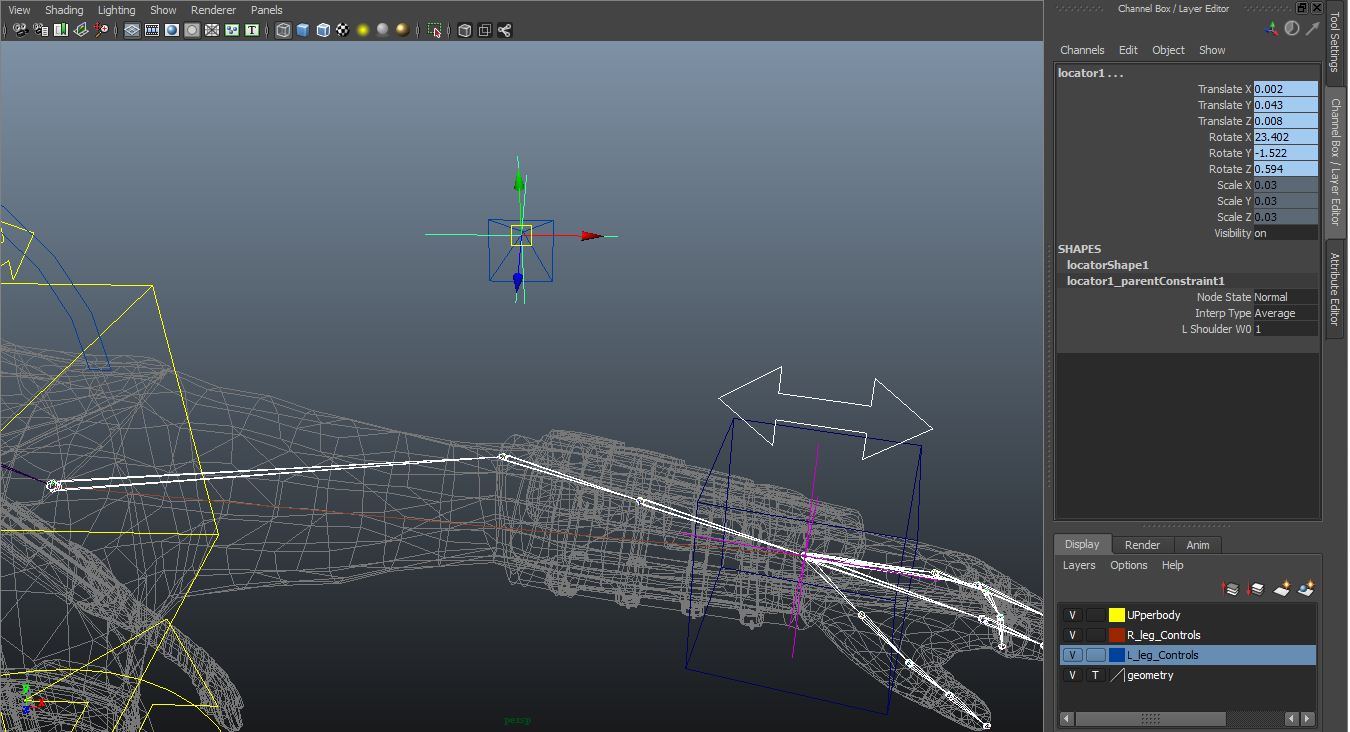
在製作mel以前我們需要設置兩個locator
分別把locator吸附在手腕關節處並且constrain parent給手腕

以及把locator2吸附在PV控制器上,然後把他constrain parent給上手臂
如果你忘記constrain parent是什麼
可以看這裡(延伸閱讀:Constrain魔法大全)
為什麼要設置這兩個控制器呢?
因為IK/FK的轉換其實就是利用這兩個locator當作定位點
在手臂在移動的過程中,素質會被記錄在locator上面
而我們就透過底下的mel,將這些素質富與給IK/FK的切換
mel如下:
//代表解釋
((提摸雞哥哥說,最好不要有中文出現,所以大家記得貼上以後要把中文殺掉
知道意思就好。
---------------------------------------這是分隔線---------------------------------------
//fk to ik//
//Left Arm ik controls--> fk controls snap
$IK_t = `xform -q -ws -t locator2`;
//尋找locator2的位移資訊
xform -ws -t $IK_t[0] $IK_t[1] $IK_t[2] L_IK_arm_controller;
//把locator2的translate資料轉移到IK手腕控制器
$IK_ro = `xform -q -ws -ro L_FK_wrist_controller`;
//尋找fk 手腕控制器的rotate資訊
xform -ws -ro $IK_ro[0] $IK_ro[1] $IK_ro[2] L_IK_arm_controller;
//把fk手腕控制器的rotate資訊轉移到IK手腕控制器
$IK_elbow_t = `xform -q -ws -t locator1`;
//尋找fk手軸定位器的translate資訊
xform -ws -t $IK_elbow_t[0] $IK_elbow_t[1] $IK_elbow_t[2] L_arm_PV_controller;
//把fk手軸定位器的translate資訊轉移到IK手軸控制器
setAttr "IK_FK.IK_FK" 0;
//把目前的fk切換成ik//
}
else if ($switch == 0)
//如果不是這樣的話,改執行下面的指令
{
//ik to fk//
//Left Arm fk controls--> ik controls snap
$FK_arm_ro = `xform -q -ws -ro L_shoulder`;
//尋找ik上手臂骨骼的rotate資訊
xform -ws -ro $FK_arm_ro[0] $FK_arm_ro[1] $FK_arm_ro[2] L_FK_shoulder_controller;
//把ik上手臂骨骼的rotate資訊轉移到fk肩膀控制器
$FK_elbow_ro = `xform -q -ws -ro L_elbow`;
//尋找下手臂骨骼的rotate資訊
xform -ws -ro $FK_elbow_ro[0] $FK_elbow_ro[1] $FK_elbow_ro[2] L_FK_elbow_controller;
//把下手臂骨骼的rotate資訊轉移到fk手軸控制器
$FK_wrist_ro = `xform -q -ws -ro L_wrist`;
//尋找手腕骨骼的rotate資訊
xform -ws -ro $FK_wrist_ro[0] $FK_wrist_ro[1] $FK_wrist_ro[2] L_FK_wrist_controller;
//把手腕骨骼的rotate資訊轉移到fk手腕控制器
setAttr "IK_FK.IK_FK" 1;
//把目前的ik切換成fk//
---------------------------------------這是分隔線---------------------------------------
紅字是必須替換成你命名的控制器
這上面寫的IK_FK.IK_FK的意思是,因為我的ik/fk控制器的名稱叫做"IK_FK"
而channels的名稱也叫做IK_FK
當我在從fk→ik的時候
打開script會看到顯示

如果我是ik→fk的話

這樣大家應該就可以了解這個mel的作用了
而我們實際使用看看~

先把手臂移動到頭頂做出敬禮的動作...
輸入我們的mel然後按一下enter

YA!大成功!!
IK順利的轉換成FK了
而且位置一模一樣!!
這樣就可以實現IK key動作,轉換成FK繼續key的方法了
而且位置一模一樣!!
這樣就可以實現IK key動作,轉換成FK繼續key的方法了
我們也可以把這個mel全選
拖拉到上排的工具列上面變成按鈕
like this!

mel的下載
原站已經有提供了~這邊就不再提供。
再轉換的關鍵禎要記得設key,不然animation會被影響到~
據說這樣的控制方法似乎有他的bug存在?
這個我不是很確定......
((因為我是IK控...
大家可以研究看看,如果有甚麼新發現大家可以一起分享 : D
以上是小弟的小小研究心得
這個我不是很確定......
((因為我是IK控...
大家可以研究看看,如果有甚麼新發現大家可以一起分享 : D
以上是小弟的小小研究心得
歡迎大家一起討論進步 : D
以上
by 偷尼 2012/6/3
實用的文章~謝謝!
回覆刪除沒想到這麼多年後,還能夠幫助到你!
刪除真是太感恩了~
滿有用的~~
回覆刪除如果說BUG
就是 MOCAP 骨架 elbow FK rotate 不會只單純有rotate X 就會出現錯唔